Category Archives: AVR
Dasar arsitektur AVR
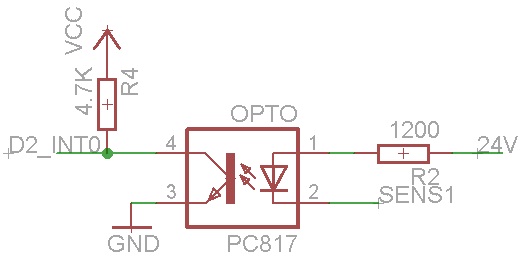
Pengetahuan Dasar Input optocoupler PC817 pada Microcontroller Arduino
Modul Input yang ada dipasaran

modul pcb input optocoupler PC817 4 channel

Rangkaian Circuit modul input 4 channel,
Contoh Penggunaan

Contoh Penggunaan input optocoupler PC817 4 channel jika menggunakan power supply tersendiri untuk input PC817
Pemrograman Input untuk modul
Aktifkan internal PULL Up arduino lewat program
#define sensor 2 // sensor di hubungkan kepin D2 arduino
void setup() {
// put your setup code here, to run once:
pinMode(sensor, INPUT);
digitalWrite(sensor, HIGH); //set pull up resitor internal
}
void loop() {
// put your main code here, to run repeatedly:
}
Pengetahuan Dasar Simpan Data Char Integer dan Array di EEPROM
Contoh Code -1
void writeInteger(int addr, int dataeeprom)
{
writeeeprom(addr+1, dataeeprom & 0xff);
writeeeprom(addr, (dataeeprom>>8) & 0xff);
}
int ReadInteger(int addr)
{ char value=0,value2=0;
value = readeeprom(addr);
value2 = readeeprom(++addr);
value = (value <<8) & 0xff00;
value = value | value2;
return value;
}
void writeeeprom(unsigned int alamat, unsigned char datana)
{
while(EECR & (1<<1));
EEAR = alamat;
EEDR = datana;
EECR |= (1<<2);
EECR |= (1<<1);
delay_ms(10);
}
unsigned char readeeprom(unsigned int alamat)
{
unsigned char dataeeprom;
while(EECR & (1<<1));
EEAR = alamat;
EECR |= (1<<0);
dataeeprom=EEDR;
return dataeeprom;
delay_ms(10);
}
void simpanArrayKeEEPROM( int array[],int alamat)
{ char i=0;
for(i=0;i<13;i++)
{
writeInteger(alamat, array[i]) ;
alamat=alamat+2;
}
}
Contoh Kode -2 dgn menggunakan library EEPROM
#include <EEPROM.h>
void writeEepromInteger(int addr, unsigned int dataeeprom)
{
EEPROM.write(addr+1, dataeeprom & 0xff);
EEPROM.write(addr, (dataeeprom>>8) & 0xff);
delay(50);
}
int readEepromInteger(int addr)
{
int value = EEPROM.read(addr);
int value2 = EEPROM.read(++addr);
value = (value <<8) & 0xff00;
value = value | value2;
return value;
}
//contoh penggunaan fungsi writeEepromInteger() diatas
writeEepromInteger(1,1500); // write intger 1500 ke alamat 1 dan 2 dimemori eeprom
writeEepromInteger(4,6789); // write intger 6789 ke alamat 4 dan 5 dimemori eeprom
//contoh penggunaan fungsi readeepromInteger() diatas
int dataku =readEepromInteger(1); //baca Eeprom alamat 1 dan 2 simpan sebagai integer di variable dataku
int datamu =readEepromInteger(4);
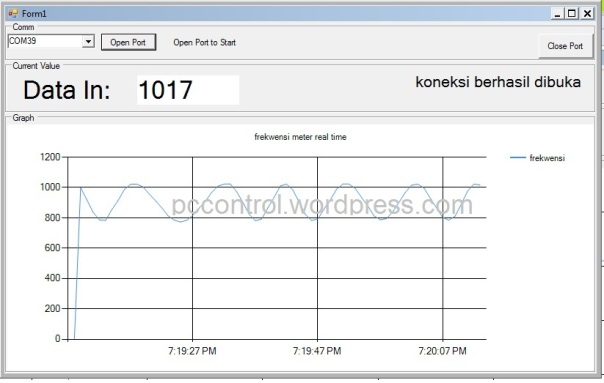
Pengetahuan Dasar Membuat Grafik Real Time VB.Net Data Serial Port Arduino
Pengetahuan Dasar Membuat Grafik Real Time Data Serial Port
Aplikasi yg dibutuhkan
VB.Net
Codevision atau Arduino
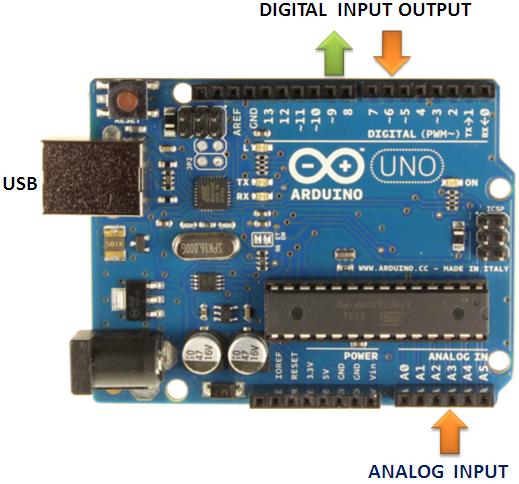
Hardware yg dibutuhkan
Usb to Serial
Mikrocontroller board AVR atau Arduino board
Tahapan Pembuatan aplikasi VB.Net
-Buka project baru
-pada form tambahkan komponen Chart,timer, textbox,listbox dan button
-Atur tata letak komponen chart,textbox,buton pada form
Kode ProgramVB.Net 2010
Imports System
Imports System.IO.Ports
Imports System.Threading
Imports System.Threading.Thread
Imports System.Windows.Forms.DataVisualization.Charting
Public Class Form1
Dim data As String
Dim frek As String
Dim RXArray(2047) As Char
Dim RXCnt As Integer ‘
Dim time As String
Dim frekwensi As String
Dim engChart As New Series
Dim WithEvents COMPort As New SerialPort
Private Sub ComboBox1_SelectedIndexChanged(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles ComboBox1.SelectedIndexChanged
End Sub
Private Sub ClosePort()
If COMPort.IsOpen Then
COMPort.Close()
End If
End Sub
Private Sub Button1_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button1.Click
If COMPort.IsOpen Then
COMPort.Close()
Label3.Text = “koneksi berhasil ditutup”
End If
End Sub
Private Sub Form1_Load(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles MyBase.Load
For Each COMString As String In My.Computer.Ports.SerialPortNames
ComboBox1.Items.Add(COMString)
Next
Chart1.Series.Clear()
Chart1.Titles.Add(“data serial real time”)
engChart.Name = “analog in”
engChart.ChartType = SeriesChartType.Line
Chart1.Series.Add(engChart)
Chart1.ForeColor = Color.Cyan
ComboBox1.Focus()
RXCnt = 0
End Sub
‘=================================================================
‘
‘=================================================================
Private Sub Receiver(ByVal sender As Object, ByVal e As SerialDataReceivedEventArgs) Handles COMPort.DataReceived
Dim RXByte As Byte
Do
RXByte = COMPort.ReadByte
RXArray(RXCnt) = Chr(RXByte)
If Chr(RXByte) = Chr(13) Then
Me.Invoke(New MethodInvoker(AddressOf Display))
RXCnt = 0
End If
RXCnt = RXCnt + 1
Loop Until (COMPort.BytesToRead = 0)
End Sub
Private Sub Display()
data = (New String(RXArray, 1, RXCnt))
TextBox1.Text = data
DoUpdate()
End Sub
Private Sub Timer1_Tick(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Timer1.Tick
time = TimeOfDay
End Sub
Public Sub DoUpdate()
Try
engChart.Points.AddXY(time, data)
Catch ex As Exception
Label3.Text = ex.Message
Finally
End Try
End Sub
Private Sub Button2_Click(ByVal sender As System.Object, ByVal e As System.EventArgs) Handles Button2.Click
If COMPort.IsOpen Then
COMPort.RtsEnable = False
COMPort.DtrEnable = False
ClosePort()
Application.DoEvents()
Sleep(200)
End If
COMPort.PortName = ComboBox1.Text
COMPort.BaudRate = 9600
COMPort.WriteTimeout = 2000
Try
COMPort.Open()
Catch ex As Exception
MsgBox(ex.Message)
End Try
If COMPort.IsOpen Then
COMPort.RtsEnable = True
COMPort.DtrEnable = True
Label3.Text = “koneksi berhasil dibuka”
End If
End Sub
End Class
kode program Arduino
void setup() {
Serial.begin(9600);
}
void loop() {
// baca analog pin 0:
int sensorValue = analogRead(A0);
// kirim hasil ke serial
Serial.println(sensorValue);
delay(1000);
}
Kode progrtam AVR codevision
/*****************************************************
Date : 13/08/2016
Chip type : ATmega16
Clock frequency : 11,059200 MHz
kontinyu kirim data :50987<0D>60734<0D>dst..
*****************************************************/
#include <mega16.h>
#include <stdio.h>
#include <delay.h>
unsigned int i;
void main(void)
{
// 8 Data, 1 Stop, No Parity
// Baud rate: 9600
UCSRA=0x00;
UCSRB=0x08;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x47;
while (1)
{
i++;
putchar(i/1000 %10 + 0x30);
putchar( i/100 %10 + 0x30);
putchar(i/10 %10 + 0x30);
putchar(‘.’);
putchar(i % 10 + 0x30);
putchar(‘\r’) ;
delay_ms(600);
};
}

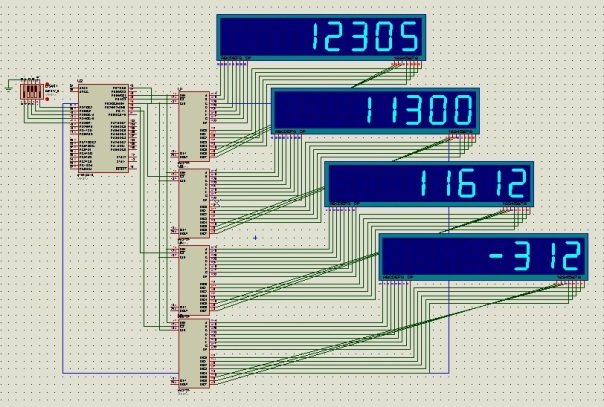
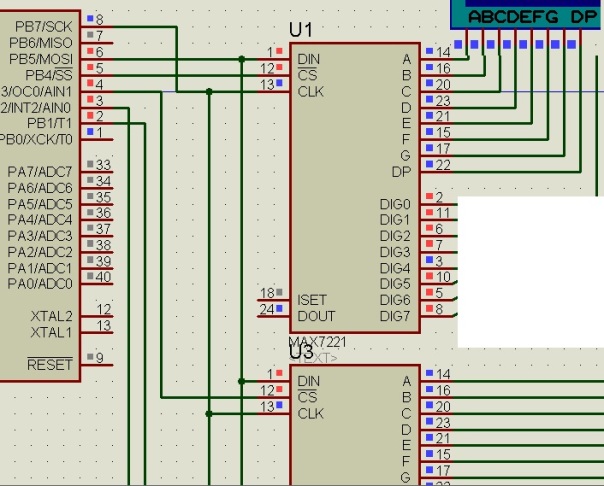
Membuat Display 4 baris 7 segment menggunakan MAX7221
Teory dasar bisa dibaca di https://pccontrol.wordpress.com/2011/09/15/pemrograman-display-7-segment-dengan-spi-max7221-max7219/
pada contoh ini menggunakan 7 segment kecil < 1 inch dgn tegangan 5v.jika Anda ingin menggunakan 7 segmen dgn tegangan lebih dari 5 v ( 7 segment ukuran yg besar i inch,2 inch 3 inch dst) maka tinggalditambahkan penguat daya misal dgn transistor atau ic ULN2083 atau lainnya.
koneksi
Kode program C dengan codevision
/*****************************************************
CodeWizardAVR V1.24.
Chip type : ATmega16
Clock frequency : 11.059200 MHz
*****************************************************/
// Standard Input/Output functions
#include <stdio.h>
#include <delay.h>
#include <spi.h>
#include <mega16.h>
//=========================
// SPI
#define PIN_SCK PORTB.7
#define PIN_MOSI PORTB.5
#define PIN_SS PORTB.4
#define ON 1
#define OFF 0
#define MAX7219_LOADa1 PORTB.4=1 //chip enable 1
#define MAX7219_LOADa0 PORTB.4=0 //chip enable 0
#define MAX7219_LOADb1 PORTB.3=1 //chip enable 1
#define MAX7219_LOADb0 PORTB.3=0 //chip enable 0
#define MAX7219_LOADc1 PORTB.2=1 //chip enable 1
#define MAX7219_LOADc0 PORTB.2=0 //chip enable 0
#define MAX7219_LOADd1 PORTB.1=1 //chip enable 1
#define MAX7219_LOADd0 PORTB.1=0 //chip enable 0
#define MAX7219_MODE_DECODE 0x09
#define MAX7219_MODE_INTENSITY 0x0A
#define MAX7219_MODE_SCAN_LIMIT 0x0B
#define MAX7219_MODE_POWER 0x0C
#define MAX7219_MODE_TEST 0x0F
#define MAX7219_MODE_NOOP 0x00
#define MAX7219_DIGIT0 0x01
#define MAX7219_DIGIT1 0x02
#define MAX7219_DIGIT2 0x03
#define MAX7219_DIGIT3 0x04
#define MAX7219_DIGIT4 0x05
#define MAX7219_CHAR_BLANK 0xF
#define MAX7219_CHAR_NEGATIVE 0xA
//================================
#define RXB8 1
#define TXB8 0
#define UPE 2
#define OVR 3
#define FE 4
#define UDRE 5
#define RXC 7
#define FRAMING_ERROR (1<<FE)
#define PARITY_ERROR (1<<UPE)
#define DATA_OVERRUN (1<<OVR)
#define DATA_REGISTER_EMPTY (1<<UDRE)
#define RX_COMPLETE (1<<RXC)
//void MAX7219_displayNumber(volatile long number);
void MAX7219_displayNumber(long number,char baris);
void MAX7219_clearDisplay(char baris);
//void MAX7219_writeData(char data_register, char data);
void MAX7219_writeData(char data_register, char data, char baris);
void spiSendByte (char databyte);
// USART Receiver buffer
#define RX_BUFFER_SIZE 8
char rx_buffer[RX_BUFFER_SIZE];
#if RX_BUFFER_SIZE<256
unsigned char rx_wr_index,rx_rd_index,rx_counter;
#else
unsigned int rx_wr_index,rx_rd_index,rx_counter;
#endif
// This flag is set on USART Receiver buffer overflow
bit rx_buffer_overflow;
// USART Receiver interrupt service routine
interrupt [USART_RXC] void usart_rx_isr(void)
{
char status,data;
status=UCSRA;
data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer[rx_wr_index]=data;
if (++rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0;
if (++rx_counter == RX_BUFFER_SIZE)
{
rx_counter=0;
rx_buffer_overflow=1;
};
};
}
#ifndef _DEBUG_TERMINAL_IO_
// Get a character from the USART Receiver buffer
#define _ALTERNATE_GETCHAR_
#pragma used+
char getchar(void)
{
char data;
while (rx_counter==0);
data=rx_buffer[rx_rd_index];
if (++rx_rd_index == RX_BUFFER_SIZE) rx_rd_index=0;
#asm(“cli”)
–rx_counter;
#asm(“sei”)
return data;
}
#pragma used-
#endif
// Declare your global variables here
char digitsInUse = 5;
void main(void)
{
// Declare your local variables here
int a,b,c,d,i;
// Input/Output Ports initialization
// Port A initialization
PORTA=0x00;
DDRA=0x00;
// Port B initialization
PORTB=0x00;
DDRB=0xff; // SCK MOSI CS/LOAD/SS
// Port C initialization
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: Off
// USART Mode: Asynchronous
// USART Baud rate: 9600
UCSRA=0x00;
UCSRB=0x90;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x47;
// SPI initialization
// SPI Type: Master
// SPI Clock Rate: 86.400 kHz
// SPI Clock Phase: Cycle Half
// SPI Clock Polarity: Low
// SPI Data Order: MSB First
//SPCR=0x53;
//SPSR=0x00;
// SPI Enable, Master mode
SPCR =0x53;
for(i=1;i<5;i++)
{
// Decode mode to “Font Code-B”
MAX7219_writeData(MAX7219_MODE_DECODE, 0xFF,i);
// Scan limit runs from 0.
MAX7219_writeData(MAX7219_MODE_SCAN_LIMIT, digitsInUse – 1,i);
MAX7219_writeData(MAX7219_MODE_INTENSITY, 8,i);
MAX7219_writeData(MAX7219_MODE_POWER, ON,i);
delay_ms(50);
}
//
// Global enable interrupts
#asm(“sei”)
a=12305;
b=11300;
c=11612;
d=b-c;
MAX7219_displayNumber(a,1);
MAX7219_displayNumber(b,2);
MAX7219_displayNumber(c,3);
MAX7219_displayNumber(d,4);
while (1)
{
i=i+1;
if(i==999)i=0;
};
}
//===============================================================================
//=========================
void spiSendByte (char databyte)
{
SPDR = databyte;
// Wait until transfer is complete
while (!(SPSR & (1 << 7)));
}
void MAX7219_writeData(char data_register, char data, char baris)
{
if(baris==1)
{
MAX7219_LOADa0;
// Send the register where the data will be stored
spiSendByte(data_register);
// Send the data to be stored
spiSendByte(data);
MAX7219_LOADa1;
}
if(baris==2)
{
MAX7219_LOADb0;
// Send the register where the data will be stored
spiSendByte(data_register);
// Send the data to be stored
spiSendByte(data);
MAX7219_LOADb1;
}
if(baris==3)
{
MAX7219_LOADc0;
// Send the register where the data will be stored
spiSendByte(data_register);
// Send the data to be stored
spiSendByte(data);
MAX7219_LOADc1;
}
if(baris==4)
{
MAX7219_LOADd0;
// Send the register where the data will be stored
spiSendByte(data_register);
// Send the data to be stored
spiSendByte(data);
MAX7219_LOADd1;
}
}
void MAX7219_clearDisplay(char baris)
{
char i;
i = digitsInUse;
// Loop until 0, but don’t run for zero
do {
// Set each display in use to blank
MAX7219_writeData(i, MAX7219_CHAR_BLANK,baris);
} while (–i);
}
void MAX7219_displayNumber(long number,char baris)
{
char negative = 0;
char i = 0;
if (number < 0) {
negative = 1;
number =number * -1; //rubah ke +
}
MAX7219_clearDisplay(baris);
// If number = 0, only show one zero then exit
if (number == 0) {
MAX7219_writeData(1, 0,baris);
return;
}
// Initialization to 0 required in this case,
// does not work without it. Not sure why.
// Loop until number is 0.
do {
MAX7219_writeData(++i, number % 10,baris);
// Actually divide by 10 now.
number /= 10;
} while (number);
// display the sign.
if (negative) {
MAX7219_writeData(i+1, MAX7219_CHAR_NEGATIVE,baris);
}
}
Membuat Interface Board Untuk Latihan Input-Output, komunikasi RS232 dan RS485
Selain kita belajar mikrokontroller melalui simulasi sebaiknya kita juga mencobanya dalam dlm keadaan sebenarnya.karena ada beberapa karakteristik elictrical yg tidak masuk dalam parameter di simulator.
Kita akan membuat sebuah board Input output dan komunikasi yg bisa dikoneksi oleh systim minimum yg ada di pasaran. berikut ini blok diagramnya:
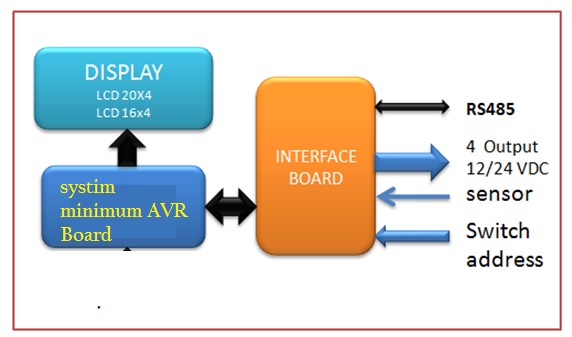
Dari gambar diatas bagian yg akan kita buat adalh interface board , dengan interface sbb:
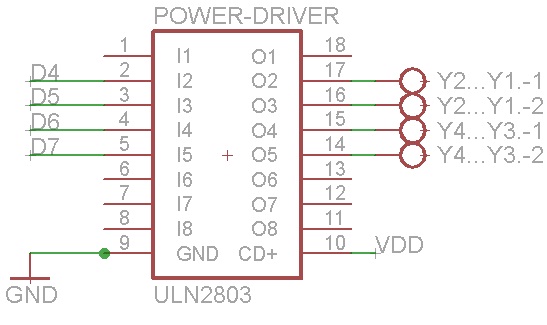
- 4 buah output 9-50 V DC (tergantung daya yg diberikan)
- 1 input sensor NPN standar industri (12/24v DC)
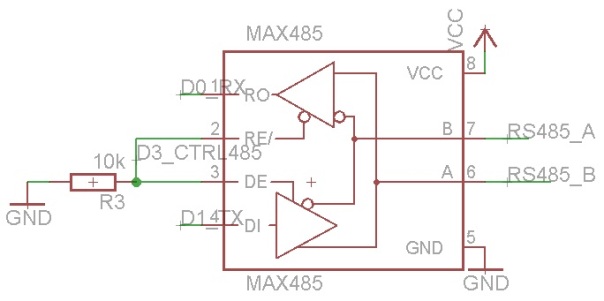
- Komunikasi RS485
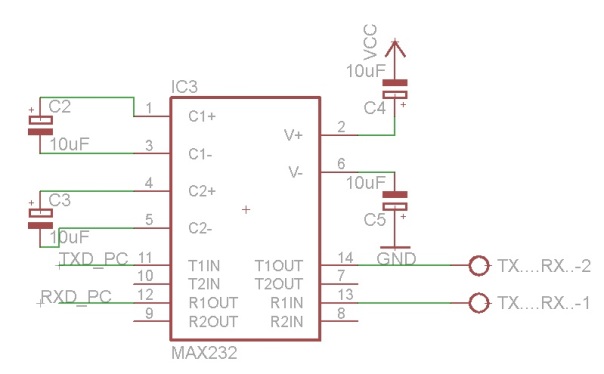
- Komunikasi RS232
baiklah langsung saja kita buat rangkaian pada IDE eagle sbb:
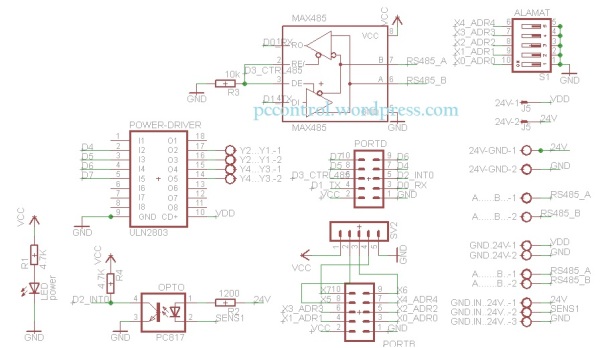
tambahkan rangkaian RS232
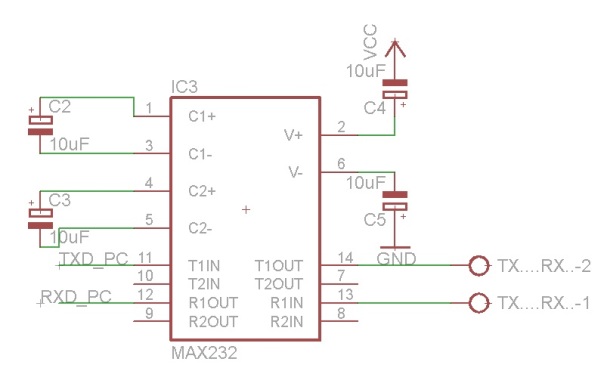
setelah selesai circuit dibuat kita menuju board
Atur ukuran PCB dan tata letak komponen diboard sesuai kebutuhan Anda. kalau saya buatnya sbb:
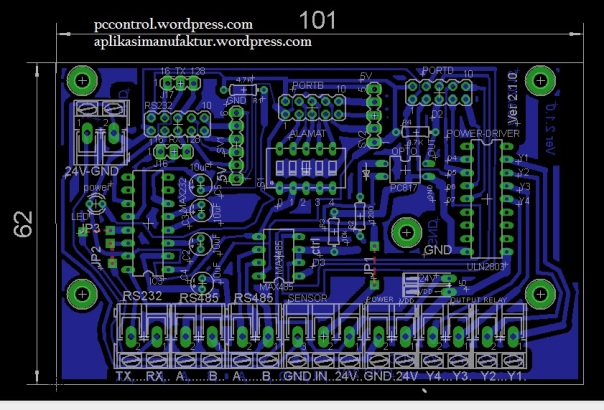
Interface Board dengan ukuran 62mm x 101mm ,sy buat ukuran tersebut untuk menyesuaikan dgn Casing yg tersedia yg sy punya.

Dimensi Casing Almunium : tingggi 16cm (160mm), lebar 10cm (100mm) tinggi casing bagian dalamsekitar 5cm(50mm). dan ketebalan plat almunium sekitar 2,5mm
Berikut ini penampakan interface board yang sudah jadi :
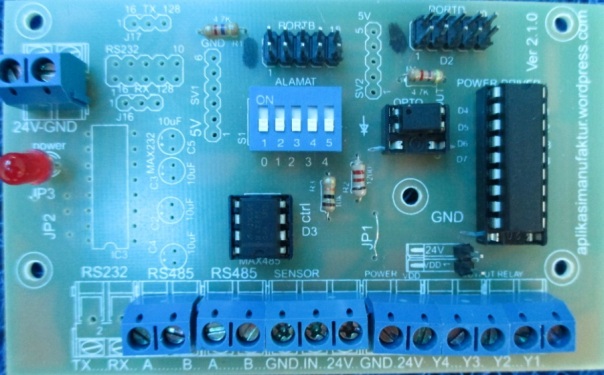
Penjelasan Masing masing bagian/fungsi dalam interface board:
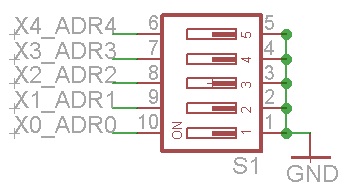
- Dip Switch , digunakan untuk input data digital dan kombinasi dari dip switch bisa digunakan untuk alamat pada percobaan komunikasi RS485.
- Komunikasi RS485 digunakan untuk komunikasi ke banyak microcontroller.
- Output Penguat Daya ULN2803 bisa digunakan menggerakan device yg mempunyai tegangan 6-50v.
- Input dgn Opto Coupler , untuk dihubungkan ke sensor industri atau juga switch on off.
- Komunikasi RS232 digunakan untuk komunikasi ke PC
tobe continue….
Pengetahuan dasar Pemrograman Led Matrix
Scan
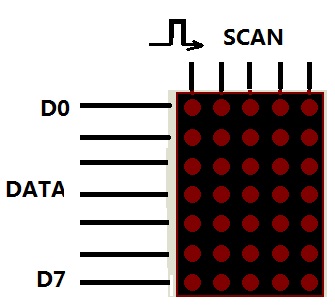
Untuk menampilkan karakter ke sebuah segment kita harus menyalakan led per kolom secara bergantian(scanning) terus menerus. Karena frekwensi scanning cepat sehingga semua led terlihat seolah menyala bersamaan.
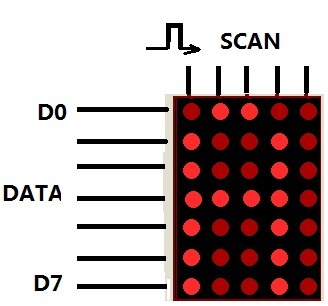
untuk karakter A maka kode untuk tiap kolom yg akan di scan adalah
kolom ke-1=0x7E , ke-2 : 0x09, ke-3 :0x09, ke-4: 0x7E, & kolom ke-5:0x7E
step/urutan menampilkan huruf A
kirim 0x7E aktifkan kolom ke-1
kirim 0x09 aktifkan kolom ke-2
kirim 0x09 aktifkan kolom ke-3
kirim 0x7E aktifkan kolom ke-4
berikut Contoh Program
/*****************************************************
Chip type : ATmega16
Program type : Application
Clock frequency : 11,059200 MHz
*****************************************************/
#include <mega16.h>
#include <delay.h>
// External Interrupt 0 service routine
unsigned short count, column, num, repeat,i;
unsigned char data[4]={‘A’,’B’,’C’,’0′};
void displayLEDmatrix(char huruf);
// Declare your global variables here
unsigned short Alphabets[130]={ 0x7E, 0x09, 0x09, 0x7E, 0xFF, // A
0x7f, 0x49, 0x49, 0x49, 0x36, // B
0x3e, 0x41, 0x41, 0x41, 0x22, // C
0x7f, 0x41, 0x41,0x22, 0x1c,
0x7f, 0x49, 0x49, 0x49, 0x63,
0x7f, 0x09, 0x09, 0x09, 0x01,
0x3e, 0x41, 0x41, 0x49, 0x7a,
0x7f, 0x08, 0x08, 0x08, 0x7f,
0x00, 0x41, 0x7f, 0x41, 0x00, // I
0x20, 0x40, 0x41, 0x3f, 0x01,
0x7f, 0x08, 0x14, 0x22, 0x41,
0x7f, 0x40, 0x40, 0x40, 0x60,
0x7f, 0x02, 0x04, 0x02, 0x7f,
0x7f, 0x04, 0x08, 0x10, 0x7f,
0x3e, 0x41, 0x41, 0x41, 0x3e,
0x7f, 0x09, 0x09, 0x09, 0x06,
0x3e, 0x41, 0x51, 0x21, 0x5e,
0x7f, 0x09, 0x19, 0x29, 0x46,
0x46, 0x49, 0x49, 0x49, 0x31, // S
0x01, 0x01, 0x7f, 0x01, 0x01,
0x3f, 0x40, 0x40, 0x40, 0x3f,
0x1f, 0x20, 0x40, 0x20, 0x1f,
0x3f, 0x40, 0x30, 0x40, 0x3f,
0x63, 0x14, 0x08, 0x14, 0x63,
0x07, 0x08, 0x70, 0x08, 0x07,
0x61, 0x51, 0x49, 0x45, 0x43 // Z
};
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=1 State5=1 State4=1 State3=1 State2=1 State1=1 State0=1
PORTA=0x7F;
DDRA=0xFF;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=1 State2=1 State1=1 State0=1
PORTB=0x0F;
DDRB=0xFF;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=P State2=P State1=P State0=P
PORTD=0x0F;
DDRD=0x00;
// Global enable interrupts
#asm(“sei”)
while (1){
// huruf A mulai index array 0-5
//huruf B mulai index array 6-11
//dst
for(i=0;i<5;i++ )
{
displayLEDmatrix(data[i]);
}
};
}
void displayLEDmatrix(char huruf)
{
//=====================
num=huruf-65;
// Display 26 alphabets
for (repeat=0; repeat<100; repeat++)
{
column = 1;
for(count = num*5;count < (num*5+6);count++) //num=0,5,10,15,dst…
{
PORTB = ~Alphabets[count];
PORTA = column;
delay_ms(5);
column = column<<1;
}
}
delay_ms(10);
//=====================
}
Ebook pengetahuan Dasar RS485
Ebook pengetahuan Dasar RS485 bisa di download disini
https://drive.google.com/file/d/0BzD886yEhaFrUTVOYmRlQjNCYlE/view?usp=sharing
Contoh Code C Microcontroller AVR Membaca String Barcode Scanner
/*****************************************************
Date : 7/27/2015
Chip type : ATmega16
Clock frequency : 11.059200 MHz
*****************************************************/
#include <mega16.h>
#include <delay.h>
#include <stdio.h>
#include <math.h>
#include <string.h>
#include <stdlib.h>
#asm
//.equ __lcd_port=0x15 ;PORTC
//.equ __lcd_port=0x15 ;PORTC
.equ __lcd_port=0x1B ;PORTA
#endasm
#include <lcd.h>
#define PANJANGBARCODE 10
char barislcd=0;
unsigned int REGISTERS[50];
unsigned char data_in[15];
unsigned char databaca[15];
unsigned char data_count;
unsigned char ada_data;
unsigned int QtyOutput;
char lcd[25];
unsigned char indexarray=0;
char temdataArray[10][11];
//char balasan[]=”C=250″;
// Variables to hold current settings
void simpandiarray( char data[],unsigned char indek);
void bacaarray(char data[], char indek);
void process_command();
void simpankeregister(char strData[], unsigned char tempAddr) ;
// USART Receiver interrupt service routine
interrupt [USART_RXC] void usart_rx_isr(void)
{
data_in[data_count] = UDR;
// End of line!
if (data_in[data_count] == ‘\r’) // end of frame: ‘\n’ ‘\r’
{
data_in[data_count-1]=0x00; //data_in[] dijadikan string tambah 0x00 di akhir
if(data_count==12)
{
process_command() ;
}
else {
lcd_gotoxy(0,2);
lcd_putsf(“data eror “);
}
//clear_data_in();
data_count = 0;
return;
}
else
{
data_count++;
}
//============
}
// USART Transmitter buffer
#define TX_BUFFER_SIZE 8
char tx_buffer[TX_BUFFER_SIZE];
unsigned char tx_index,tx_counter;
// USART Transmitter interrupt service routine
interrupt [USART_TXC] void usart_tx_isr(void)
{
if (tx_counter)
{
–tx_counter;
UDR=tx_buffer[tx_index];
if (++tx_index ==8) tx_index=0;
};
}
void process_command()
{
char i,j,k,m;
//a b c d e f g h i j
//0 1 2 3 4 5 6 7 8 9
QtyOutput++ ;
delay_ms(50);
lcd_gotoxy(13,3);
itoa(QtyOutput,lcd);
lcd_puts(lcd);
simpandiarray(data_in,indexarray) ;
//display
bacaarray(databaca,indexarray);
lcd_gotoxy(0,barislcd);
lcd_puts(databaca);
delay_ms(50);
if(barislcd == 0){
lcd_gotoxy(11,barislcd+3);
lcd_putchar(0x20);
}
//=======================
if(barislcd > 0){
lcd_gotoxy(11,barislcd-1);
lcd_putchar(0x20);
}
lcd_gotoxy(11,barislcd);
lcd_putsf(“*”);
delay_ms(50);
//=======================
barislcd++;
if(barislcd==4) {
barislcd=0;
}
delay_ms(50);
lcd_gotoxy(13,2);
itoa(indexarray*5,lcd);
lcd_puts(lcd);
if(indexarray==9) {
indexarray=0;
lcd_gotoxy(13,2);
lcd_putchar(0x20);
lcd_gotoxy(14,2);
lcd_putchar(0x20);
lcd_gotoxy(13,2);
itoa(indexarray*5,lcd);
lcd_puts(lcd);
lcd_puts(lcd);
}
indexarray++;
}
void simpandiarray( char data[], unsigned char indek)
{
char i;
{
for(i=0;i<PANJANGBARCODE;i++)
temdataArray[indek,i]= data[i];
}
data[10]=0x00;
simpankeregister(data,(PANJANGBARCODE/2)*indek); // alamat 0,5,10,15,20
}
void bacaarray(char data[], char indek)
{
char i;
for(i=0;i<PANJANGBARCODE;i++){
data[i] =temdataArray[indek,i];
}
data[10]=0x00;
}
void main(void)
{
PORTA=0x00;
DDRA=0x00;
PORTB=0x00;
DDRB=0xff;
PORTC=0x00;
DDRC=0x00;
PORTD=0x37; //0011 0111
DDRD=0xc8; //1100 1000
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud rate: 9600
UCSRA=0x00;
UCSRB=0xD8;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x47; //9600
//UBRRL=0x0B; //57600
//UBRRL=0x05; // 115200
PORTD.3=0;
// LCD module initialization
lcd_init(16);
lcd_gotoxy(0,0);
lcd_putsf(“barcode buffer”);
delay_ms(1000);
lcd_clear();
// Global enable interrupts
#asm(“sei”)
while (1)
{
}
}
//=============function declaration ==========================
//simpan 1 string barcode ke 5 register ab cd ef gh ij
void simpankeregister(char strData[],unsigned char tempAddr)
{
char i;
unsigned int tempData=0;
for(i=0;i<PANJANGBARCODE/2;i++,tempAddr++)
{
tempData = strData[(i*2)];
tempData = tempData <<8;
tempData = tempData | strData[i*2+1]; //
REGISTERS[tempAddr] = tempData;
}
}
Contoh Program AVR Simulasi Modem Wavecom
untuk dasar AT Command bisa baca disini :
Beberapa AT Command (dan respon modem) yg sering digunakan antara lain
| Dari AVR/PC | Dari Modem | keterangan………………… |
| AT | <CR><LF>OK<CR><LF> | attention |
| ATE0 | <CR><LF>OK<CR><LF> | Echo dimatikan |
| AT+CMGF=1 | <CR><LF>OK<CR><LF> | set ke mode text |
| <CR><LF>+CGMI: “SM”,1<CR><LF> | interupsi/notif pemberitahuan ada sms baru | |
| AT+CMGR=1 | <CR><LF>+CMGR: “REC READ ,” +6289661513602″ ,,”15/12/05,10:38: 19+28″ <CR><LF> <isi sms><CR><LF>OK<CR><LF> | baca sms indek no 1 |
| AT+CMGL=”ALL” | +CMGL: 1,”REC READ”, “+6283840367773”,, “15/10/ 20,16:02: 28 + 28″ <isi sms> <CR><LF>OK<CR><LF>
+CMGL: 2,”REC READ”, “+628384036799”,, “15/10/ 20,16:02: 28 + 28” <isi sms> <CR><LF>OK<CR><LF> |
list semua isi sms |
| AT+CMGD=2 | <CR><LF>OK<CR><LF> | hapus sms indek ke 2 |
| AT+CMGS=<no hp> <CR><CTRL-Z> | <CR><LF>OK<CR><LF> | kirim sms |
Berikut ini contoh respon modem dalam bentuk text
<CR><LF>+CMGR: “REC READ”,”+6289661513602″,,”15/12/05,10:38:19+28″<CR><LF>
tes2 <CR><LF>OK<CR><LF>
Jika kita convert per byte karakter nya dlm bentuk hexa menjadi sbb:
0D 0A 2B 43 4D 47 52 3A 20 22 52 45 43 20 52 45 41 44 22 2C 22 2B 36 32 38 39 36 36 31 35 31 33
36 30 32 22 2C 2C 22 31 35 2F 31 32 2F 30 35 2C 31 30 3A 33 38 3A 31 39 2B 32 38 22 0D 0A 74 65
73 32 0D 0A 0D 0A 4F 4B 0D 0A
Silahkan di lanjutkan ya…

/*****************************************************
Chip type : ATmega16
Clock frequency : 11,059200 MHz
program AVR pura pura jadi modem
*****************************************************/
#include <mega16.h>
#include <delay.h>
#include <stdio.h>
#include <math.h>
#include <string.h>
#include <stdlib.h>
// Alphanumeric LCD Module functions
#asm
.equ __lcd_port=0x1B ;PORTA
// .equ __lcd_port=0x18 ;PORTB
// .equ __lcd_port=0x15 ;PORTC
#endasm
#include <lcd.h>
void process_command();
unsigned int parsing_data();
char compare(char *str1, char *str2);
unsigned int REGISTERS[15];
unsigned char data_in[16],alamatSlave;
unsigned char data_count;
unsigned char ada_data;
char lcd[25],dataString[20], dataChar,adaAwalPaket;
char alamatTemp[5],alamat;
char ok[]=”\r\nOK\r\n”;
char sms[]=”\r\n+CMGR: \”REC UNREAD\”,\”+6289661513602\”,\”98/10/01,18 :22 :11+00\”,\r\nrelay#01#ON\r\n” ;
//=====================================
char AT[]=”AT”;
char ATE0[]=”ATE0″;
char ATCMGF[]=”AT+CMGF=1″;
char ATCMGD[]=”AT+CMGD=1″ ;
char ATCMGR[]=”AT+CMGR=1″ ;
char ATCMGS[]=”AT+CMGS=1″ ;
char error[]=”\r\nerror\r\n”;
//ceritanya kalau tombol di tekan ada sms masukkirim notif +CMTI ke AVR
interrupt [EXT_INT0] void ext_int0_isr(void)
{
delay_ms(60);
putchar(‘+’);
putsf(“CMTI : \”SM\”,1″);
delay_ms(60);
}
// USART Receiver interrupt service routine
interrupt [USART_RXC] void usart_rx_isr(void)
{
dataChar=UDR;
if(adaAwalPaket==0)
{
adaAwalPaket=1;
data_count=0;
}
if(adaAwalPaket==1) //karakter setelah @ disimpan
{
data_in[data_count] = dataChar;
if (data_in[data_count] == ‘\n’) // jika data batas akhir ‘\n’ simpan paket data sbg string
{
data_in[data_count]=0x00; //akhir sebuah string adalah byte 0x00 (NULL)
adaAwalPaket=0;
ada_data = 1;
data_count = 0;
lcd_gotoxy(0,0);
lcd_puts(data_in);
return;
}
else //data blm sampe ‘\n’
{
data_count++;
}
//============
}
}
// Declare your global variables here
void main(void)
{
PORTD=0x04;
DDRD=0x00;
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Baud rate: 9600
UCSRA=0x00;
UCSRB=0x98;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x47;
// INT0: On
// INT0 Mode: Low level
GICR|=0x40;
MCUCR=0x00;
MCUCSR=0x00;
GIFR=0x40;
// LCD module initialization
lcd_init(16);
// Global enable interrupts
#asm(“sei”)
while (1)
{
// Place your code here
if(ada_data) // not null
{
process_command() ;
ada_data = 0;
};
};// eof while
} //eof main
unsigned int parsing_data()
{
return 0;
}
char compare(char *str1, char *str2)
{
if(!strcmp(str1,str2)){
return 1; }
else {
return 0;}
}
void process_command()
{
if(compare(data_in,AT))
{
puts(ok);
return ;
}
if(compare(data_in,ATE0))
{
lcd_gotoxy(0,1);
lcd_putsf(“minta echo off”);
puts(ok);
return ;
}
if(compare(data_in,ATCMGF))
{
lcd_gotoxy(0,1);
lcd_putsf(“minta MODE TEX”);
puts(ok);
return ;
}
if(compare(data_in,ATCMGR))
{
lcd_gotoxy(0,1);
lcd_putsf(“minta data sms”);
puts(sms);
puts(ok);
return ;
}
puts(error);
return;
}
Pengetahuan Dasar Pemrograman Sensor Berat ( Load Cell)
UNDER CONTRUCTION
Pendahulian
Sensor->IC HX711 -> Microcontroller -> Display
Sensor
Salah satu sensor berat (load cell ) yaitu Strain Gauge
Rangkaian Brigdge Stone
rangkaian ini digunakan untuk menambah sensitifitas output sensor
Serial Interface IC HX711
IC HX711 adalah IC ADC 24 bit dgn output serial digital ,keluaran IC ini berupa tegangan yg sebanding dengan berat yg di berikan.

Mencari peramaan linierisasi input Vs Output (pers Y= aX + C).
karena input dan output tdk 100% linier maka perlu dicari persamaan untuk linierisasi hubungan input vs output.
Ambil data percobaan berat dan Output Sensor
masukan tabel input vs output ke excel ->blok data tsb-> buat grafik scatter->klik kanan data di grafik -> add trenline->check add equationon chart.
misal kita dapat persamaan Y=m.X – c , Y adalah output ADC ,m =gradient/kemiringan , X = berat beban , c =konstanta/offset
maka rumus mencari berat X = (Y-c)/m
code program membaca serial data IC HX711
misal dari beberapa data yg kita ambil kita dapatkan hubungan peramaan Y=0.5 X-600
Maka X= (Y-600)/0.5
#define pin_data PORTB.0
#define pin_clock PORTB.1
unsigned long ReadCount(void){
unsigned long Count;
unsigned char i;
unigned long HX711_Buffer = 0;
unsigned long Weight= 0;
pin_data=1;
pin_clock=0;
Count=0;
while(pin_data);
for (i=0;i<24;i++){
pin_clock=1;
Count=Count<<1;
pin_clock=0;
if(pin_data) Count++;
}
pin_clock=1;
Count=Count^0x800000;
pin_clock=0;
return(Count);
}
unsigned int GetWeight()
{
HX711_Buffer = ReadCount();
HX711_Buffer = HX711_Buffer/100;
Weight = HX711_Buffer;
Weight = Weight – 600;
Weight = (unsigned int)((float)Weight/0.5);
return Weight;
}
void main(void)
{
PORTB=0x01;
DDRB=0x02;
while(1)
{
// output ADC ic hx711 = readCount();
//berat=GetWeight();
}
referensi:
-datasheet HX711
-https://www.transducertechniques.com/wheatstone-bridge.aspx
-https://learn.sparkfun.com/tutorials/getting-started-with-load-cells

